 |
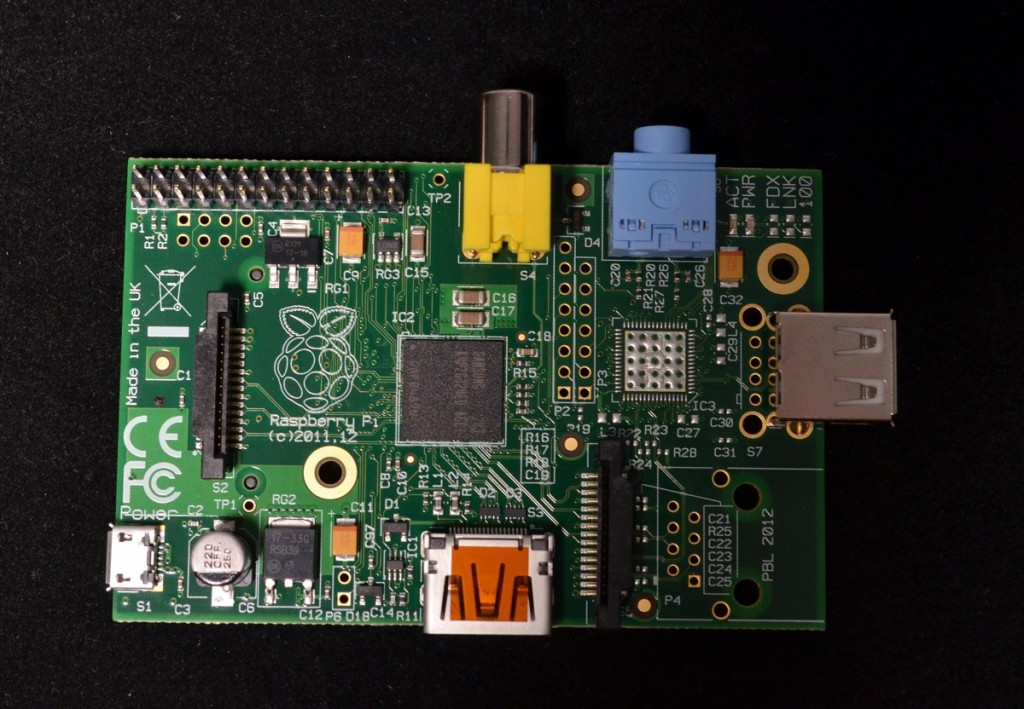
| RPI Model A |
The Model A looks really nice to me especially for robot control.
My plan is to use my Model B as the secondary controller for my robot, it has much more memory and processing power than my arduino boards. My plan is that this secondary controller should be stationary and communicating with the robot by 433Mhz radio or Bluetooth.
The secondary controllers job is to collect mapping data from the sensors and perhaps to make decisions.
No comments:
Post a Comment