 |
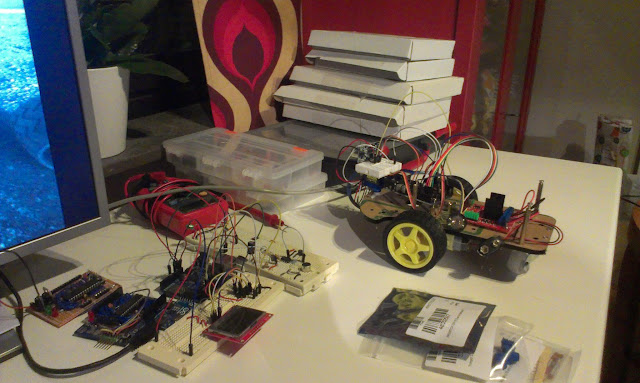
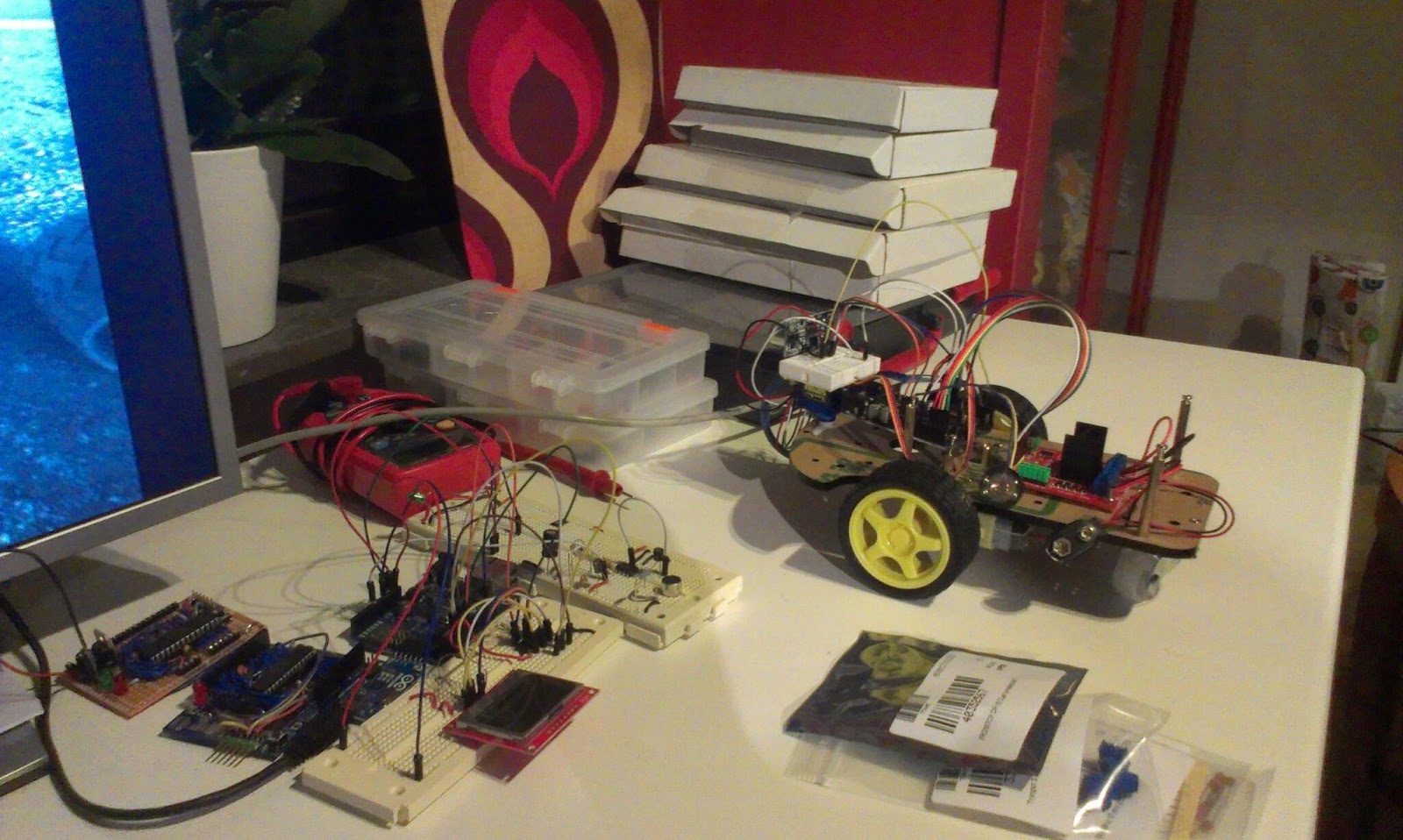
| The current setup, the breadboards with microphone and the robot with speaker |
Method
The robot first sends a synchronization through a wire (fatal mistake) and after a specific time interval the robot outputs a sound signal through its speaker.
On the receiving Arduino I wait for the signal through the wire and starts a timer when it is received and when the microphone picks up a sound the timer is stopped.
The time difference is multiplied with the speed of sound 340 m/s to get a distance reading.
Results
The issue was that the speaker produces A LOT of disturbance that passes directly through the wire. This is picked up by the sensitive microphone amplifier unit and since it contains the correct frequency it is identified as the right signal.
Conclusion
Do not connect sensitive amplifying circuits to speakers (or motors).
I could have guess this would happen and kind of expected it, so hopefully I get some quality time tonight using 433Mhz radio for synchronization tonight.
Oh and I received my order , I look forward to test the Dual Monolithic Tone Decoder and compare it to the fft-results
{kind=link}
 |
| New parts recieved, mostly capacitors and some IC´s |
{kind=link}
No comments:
Post a Comment