 |
| New parts received |
The HC-SR04

For the HC-SR04 I use the NewPing library
From the datasheet
Specifications:
power supply :5V DC
quiescent current : <2mA
effectual angle: <15°
ranging distance : 2cm – 500 cm
resolution : 0.3 cm
I already have a SR04 and plan to use these two for obstacle avoidance. They have a quite wide beam so they are not that good for mapping. Right now I have one placed on top of the Sharp sensor to give accurate measurements below 16 cm. The ranging distance seems to be more about 240cm.
433Mhz radio reciever x2 and transmitter x2
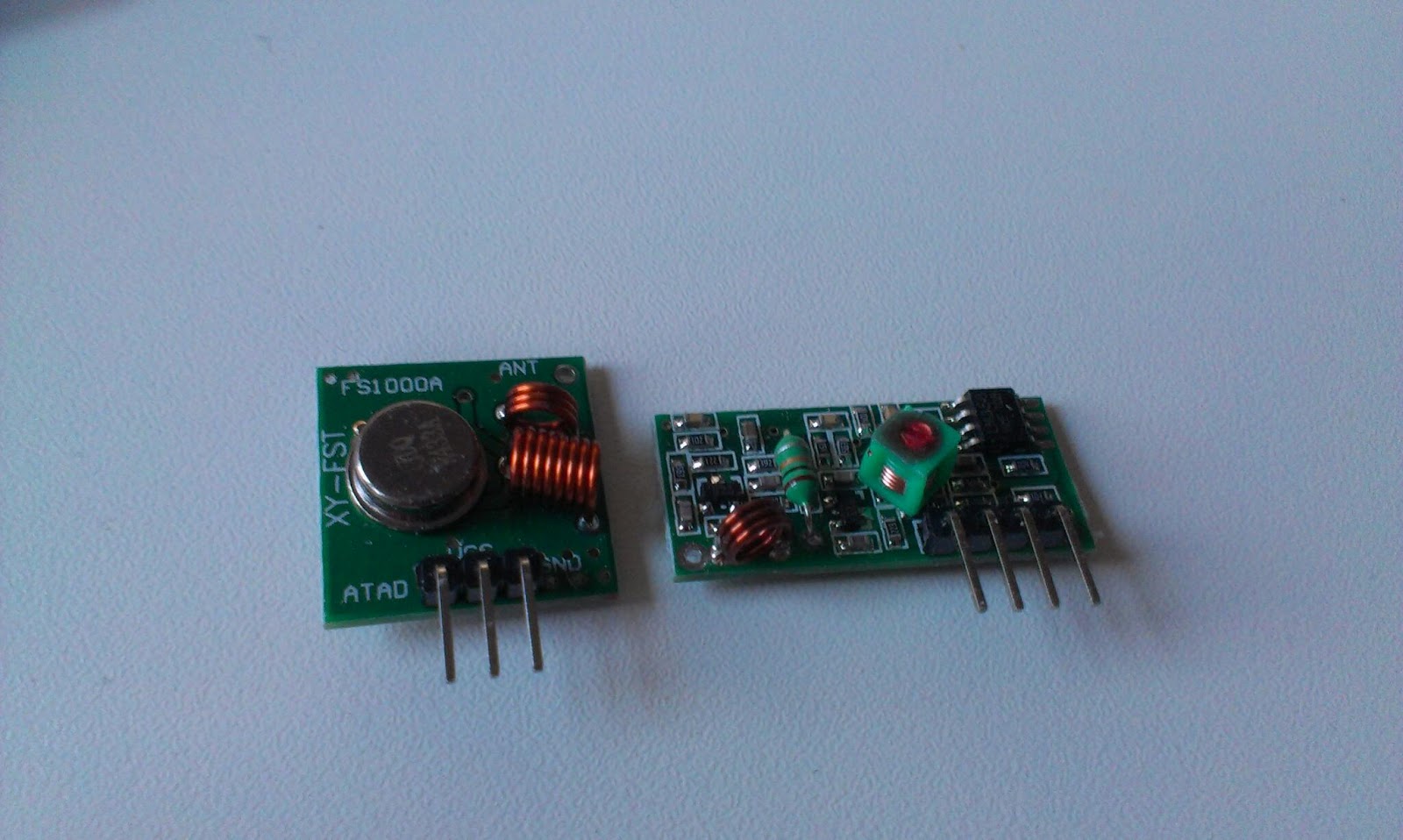
For the transmitters and receivers I use the VirtualWire library
I dont have datasheets on these, but I hope they are similar to the other units I have tried before in my wireless sensor project. I have two receivers and two transmitters of different types and think they are very easy to use and stable on short distances.
A transiever pair should be placed on the robot itself another pair should be used with the Raspberry pi. The robot should send sensor data and recieve orders or processed sensor data.
 |
| A transceiver shield from my wireless sensor project. (on top of Arduino Ethernet) |
Switches
 |
| switch |
Some shield material and 3x ATMEGA8´s
 |
| Shield PCB. headers and 3x ATMEGA8 |
The headers are to be used in some shield projects. I plan to build a Paper-Duino Pi. And perhaps build a few more arduino boards.
The ATMEGA8 datasheet. A post on how to program the ATMEGA8 here. The atmegas are to be used to build soundbeacons for robot navigation. Not totally figured that one out yet :)
No comments:
Post a Comment