Introduction
My goal is to use a number of microphones to
pinpoint the location of a sound-source. In my case I´d like that sound-source to be a robot and the microphone array helps it to locate itself.
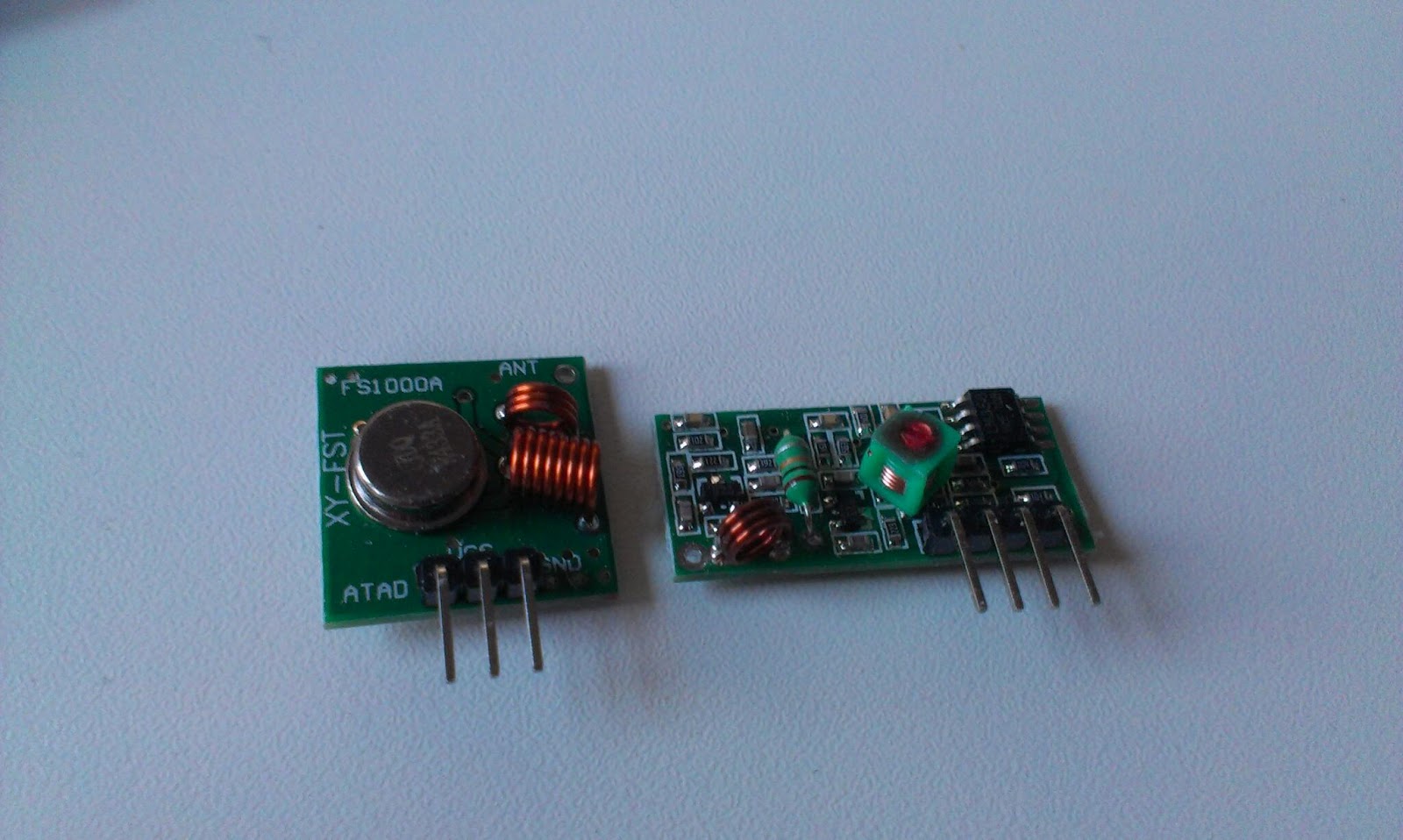
The microphone is synchronized with the robot using 433Mhz radio, I did
some attempts using a wire but get signals passing through it.
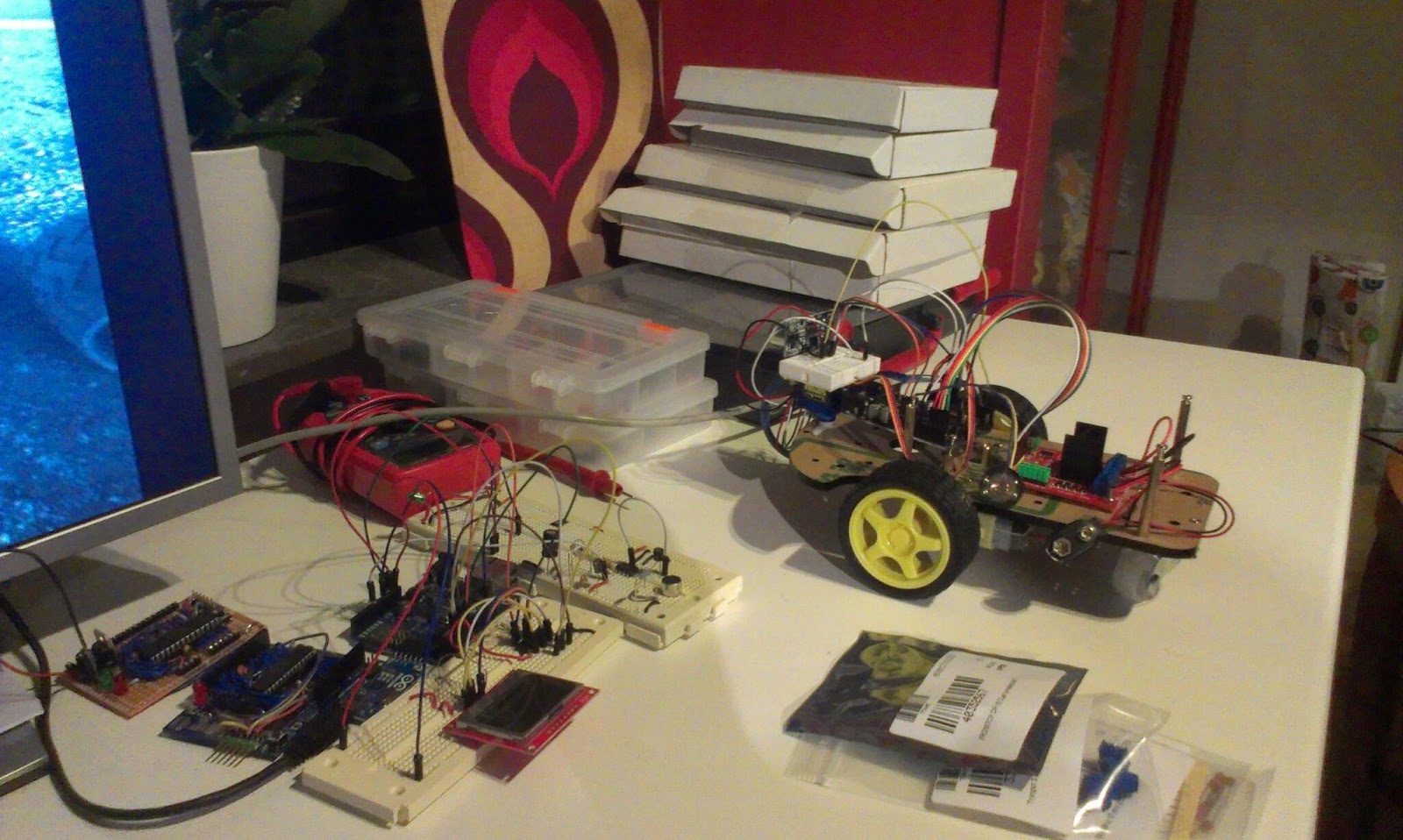
 |
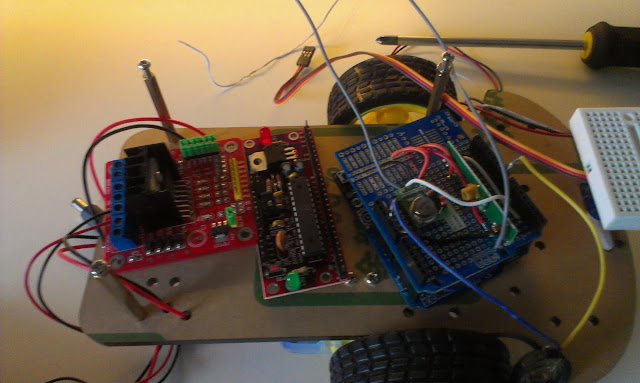
| The sound source(Robot) with 433Mhz radio and speaker |
Method 1. The Goertzel Library
I have used
this library to detect a specific frequency. The library detect the frequency but I get both false positives and false negatives at such error rate that it becomes unusable.
It does not seem very good with low amplitudes.
Method 2. FFT
I have successfully used
FFT to isolate and identify the specific frequency the robot emits. The problem is that the FFT takes a long time to sample(256 samples) and to process.
That means that I can detect that the sound but not the exact timing the sound arrives at. There are also some issues with measureing time when the library shuts down timers and interrups...
Method 3. XR2567CP Tone Decoder (today)
The third attempt uses a tone decoder IC to identify the frequency. The
datasheet was a pretty bad scan, but eventually I managed to get it correctly setup.
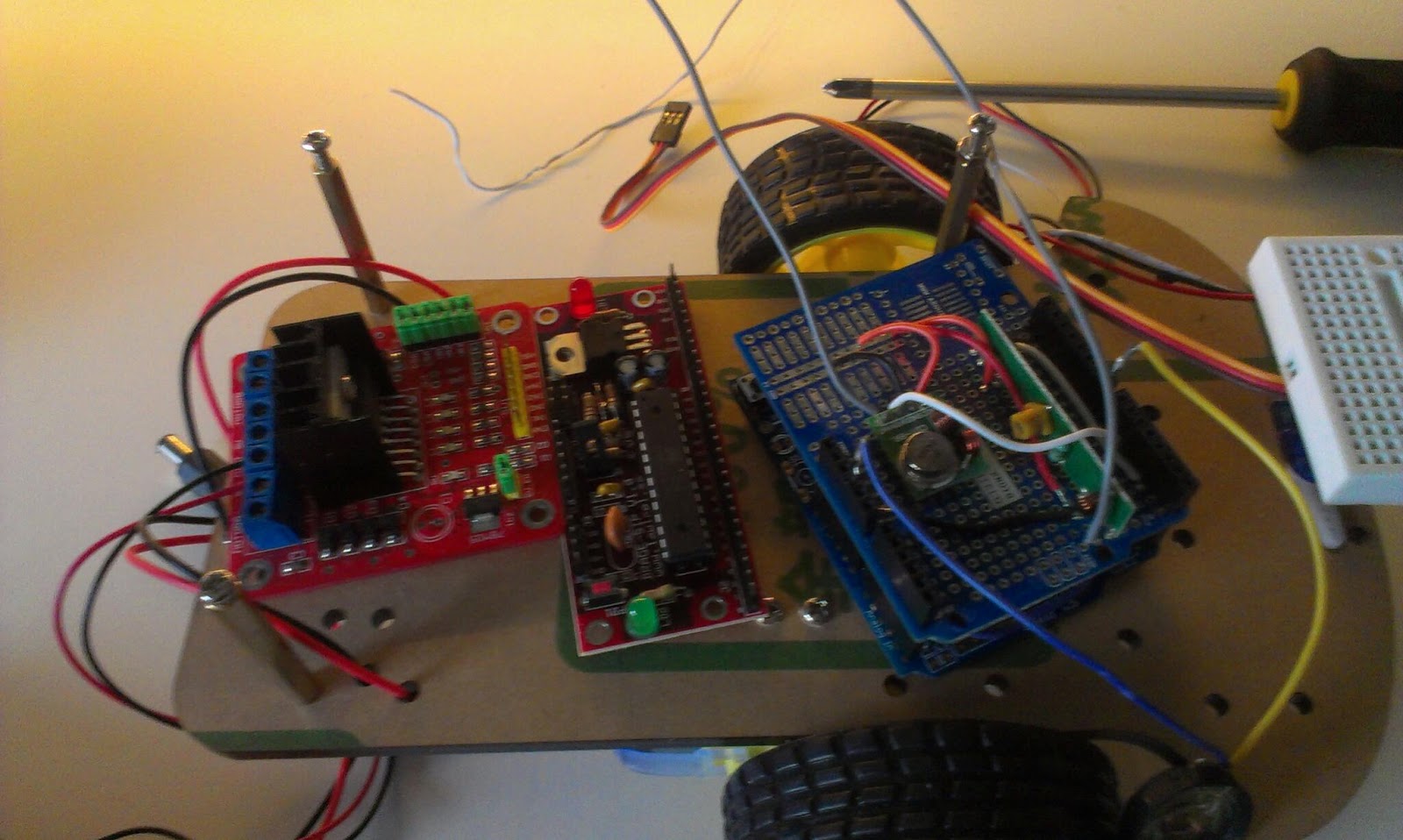
 |
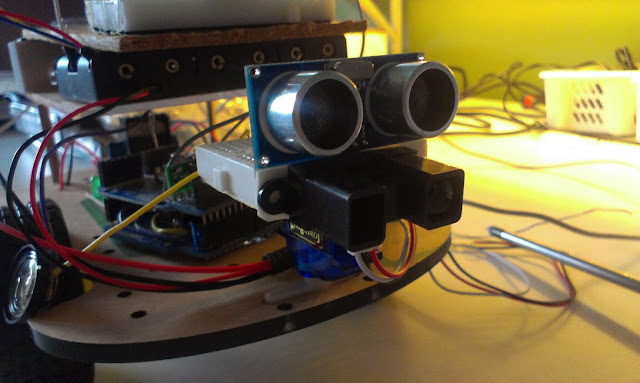
| The receiver microphone in the center, the amplifier and XR2567 in the middle and 433Mhz radio to the right. |
The circuit sends a radio pulse to the "Robot" and the Robot transmits a short sound of 4670Mhz. The pulse is picked up and time is measured.
Unfortunatly the XR2567 takes a "long" time to lock itself to the frequency and with different delay each time. The datasheet actually specified this in a graph.
Conclusion
Fail on all three methods, so what is next?
I believe I will try with ultrasound!












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}