I started to build a larger platform for my robot. The old platform has three levels and is quite packed with sensors and cables. Since most cables are connected to the Arduino board, I need to dismantle most of the robot when I make changes. Also I wanted to be able to make distance readings in all directions
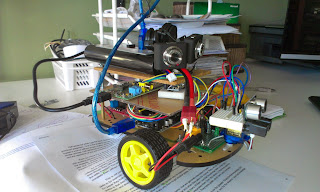 |
| The old robot is packed with sensors. |
I made cardboard templates for most of the hardware to be able to play with layout a bit easier. I decided to make the robot round-ish but ended up making it an octagonal-ish. With centered wheels so it will turn around its center.
The third wheel is placed on one side and weight is distributed accordingly.
 |
| Plywood with cutouts for wheels and cardboard templates for parts |
Parts:
- Plywood 30*30 cm
- Raspberry Pi Model A
- Arduino Duemilanove
- LiPo battery
- H-bridge 7.4V 3300
- Power converter
- 2 * 6V geared motors
- Servo
- 2 * IR Sensors Sharp GP2Y0A02YK0F
- 2 * Ultrasonic sensors HC-SR04
- Compass HMC5883L
- Accelerometer and Gyro MPU6050
- USB-Hub
 |
| Before dismantling the old robot |
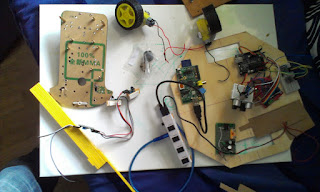
 |
| Lots of parts and cables, My Raspberry Pi model A to the right |
The old robot was dismantled in order to find more precise measurements for drilling.
 |
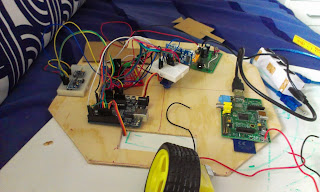
Testing layout with real hardware instead of cardboard
|
I intend to make distance measurements in all directions. I have mounted two IR-distance sensors and two ultrasonic sensors on a piece of wood. It is going to be placed on top of a servo. An unsolved problem is that I must be able to shut the sensors on and off independently since I have noticed that they interfere with each other.
 |
The new two directional sensor IR and ultrasonic
|
Most parts are assembled and I have glued the support for the third wheel as well as the servo.
Now waiting for the glue... to be continued...






No comments:
Post a Comment