Today I started to think of different layouts for my robot. I intend to put lots of stuff on this one, that means I quickly ran out of space. Therefore the layout will require at least 3 storage's of components.
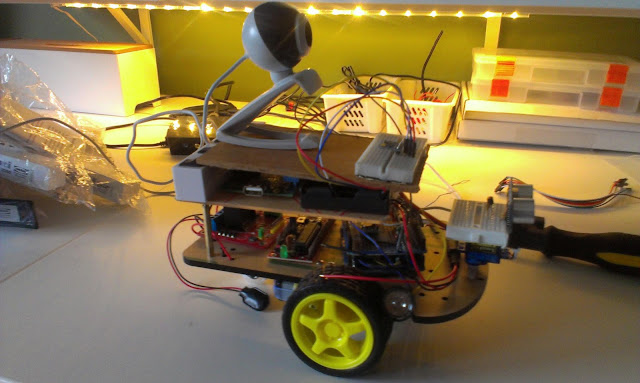 |
| On top camera and electronic compass |
Nothing is connected so far, I have tested different components separately. For these images I just put stuff on top of each-other to get a feel for the space requirements and possible problems.
 |
| Middle level, USB hub with wifi, Raspberry Pi Model A, and batteries |
One of the main concerns is interference on the electronic compass circuit. That must be tested together with other components. Another concern is that I think I might run out of Arduino pins, so I'm prepared to use two boards for this robot. My third concern is battery consumption, the RPi needs to be powered, so the plan is to power the USB hub from batteries. For that I need to 7805 circuit that has a decent ampage...
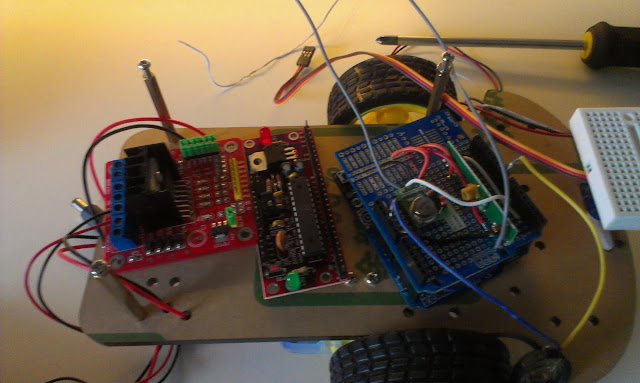 |
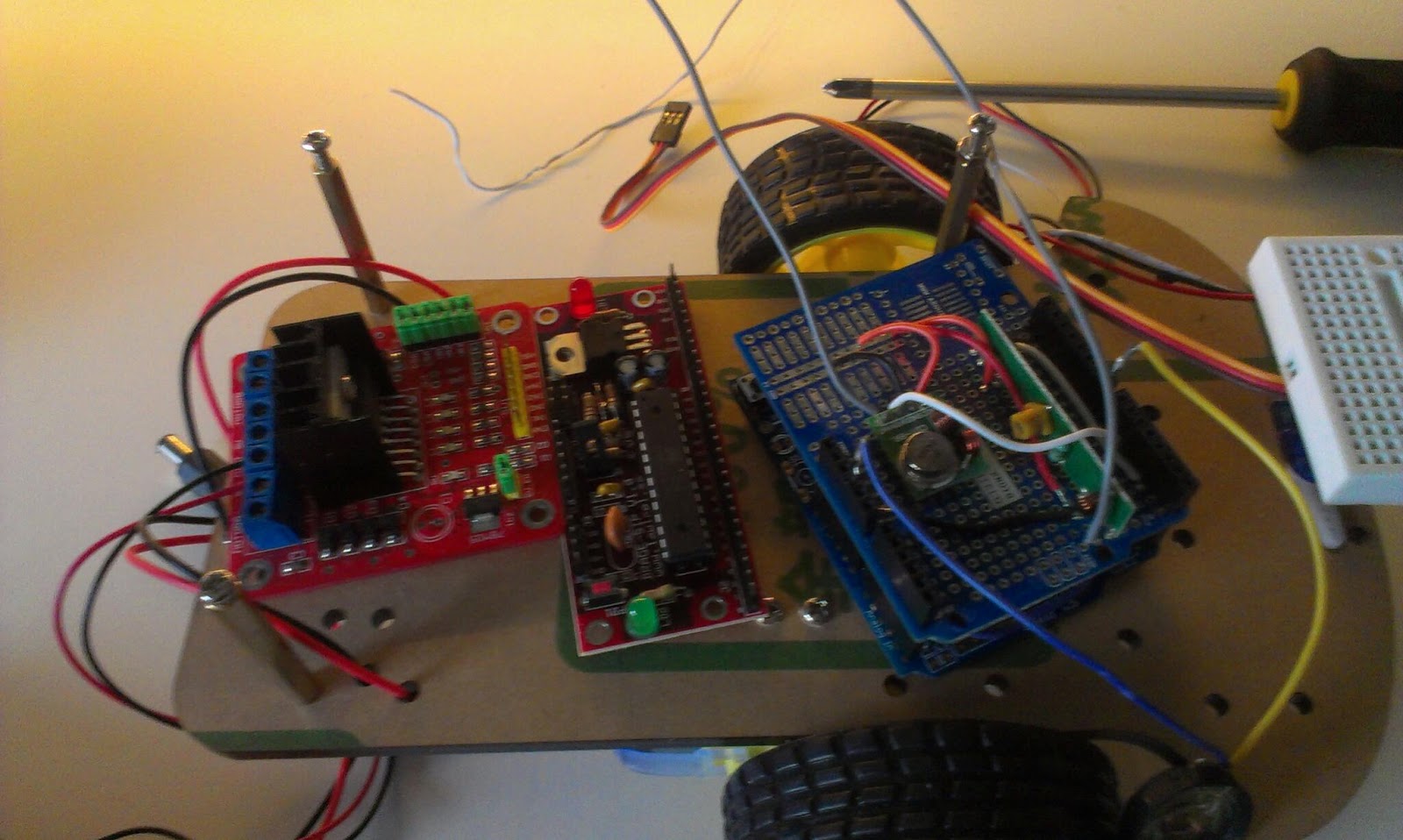
| Bottom level, H-Bridge, Arduino 1, Arduino 2 with 433 MHz radio and speaker. |
 |
| A speaker for the localization-trilateration of the robot. |
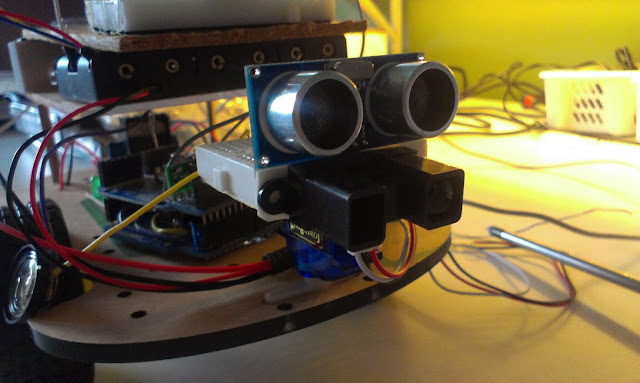 |
| Distance Sensors,HC-SR04 and Sharp IR sensor for mapping |
 |
| Now its time to drill holes and connect the different components... |


{kind=link}
{kind=link}
{kind=link}

No comments:
Post a Comment