I have started the assembly of my three storage robot. Not that easy considering how much hardware this little dude got. Good thing is that the power-supply I soldered the other day seems to hold up nicely. A great thing is that I can run the robot on external power when I´m not driving it. So today I attached power, keyboard and screen since I have problem connecting to it with SSH. My Wifi-dongle seems to go into power-save mode every five seconds or so, making it hard to connect to... Well will buy new one.
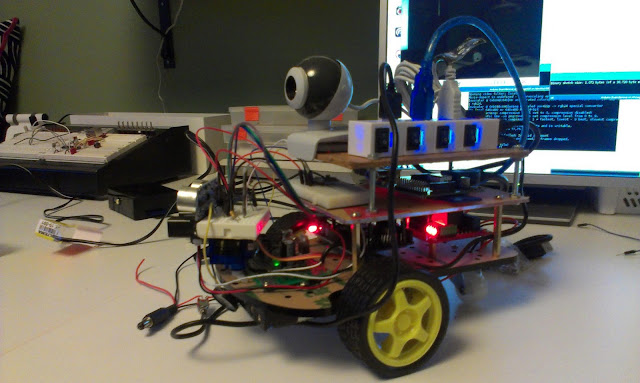 |
| A beautiful mess of cables and LEDs |
I still got a few cables to connect for the speaker and electronic compass, and give power to the H-Bridge. Also maybe the compass circuit can be directly connected to the GPIO of the Raspberry Pi. That would free up some pins(and memory) on the Arduino-board.
The webcam and USB-hub remains to be permanently attached on the topmost layer. I think I will use double sided tape. The cable that connects the webcam is very much too long and adds up to the weight of the robot. A nice thing with the USB-hub I use is that it has got individual power buttons, so I can switch on and off different hardware during programming.
 |
| Programming the Arduino from the Pi |
The important test for today was to program the Arduino board from the RPi. I tried the Blink sketch first since nothing is attached to the pin 13. I also ran the Sweep-sketch to test the servo that controls the head of the robot. The head moves fine and no cables get stuck...
More test will have to be done to test the Sonar and IR, but I think I will need to dissemble the robot first in order to attach those cables properly.
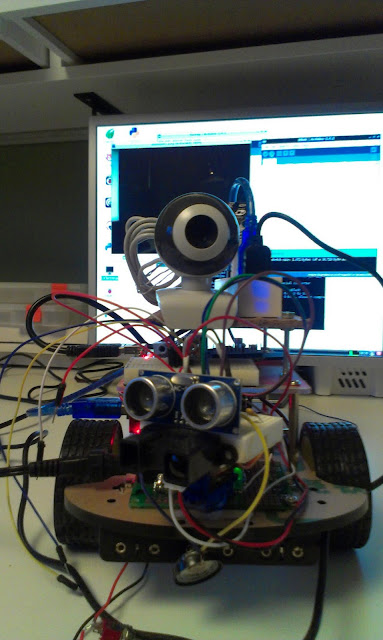 |
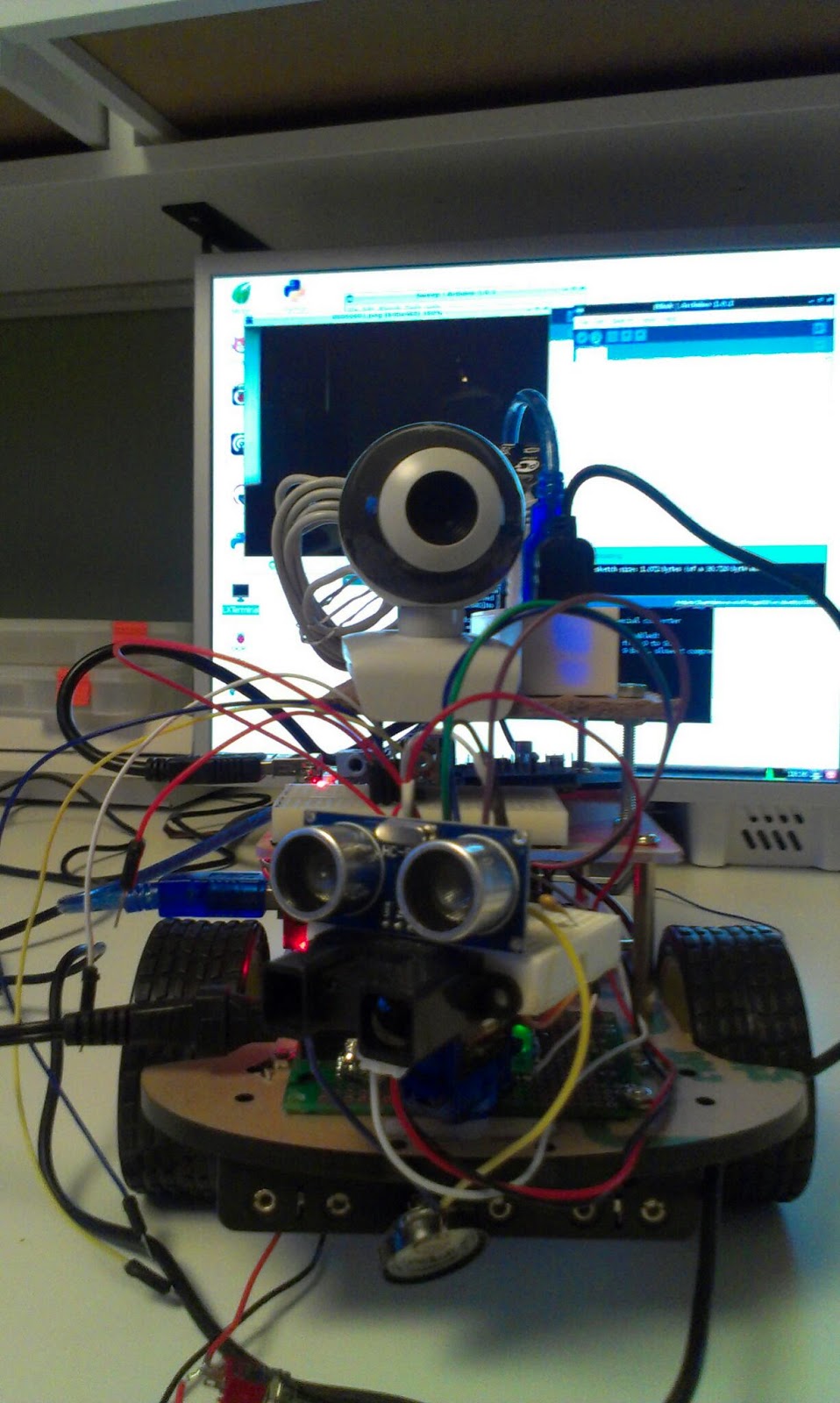
| Sensors: Webcam, Sonar, IR and speaker. Battery pack can be seen on the bottom. |
I have also tried using the webcam from the raspberry pi linux console. I used the "mplayer -vo png -frames 1 tv://" command that takes a single screenshot naming it 00000001.png. The images are a bit dark but I think it will work.
{kind=link}
{kind=link}
No comments:
Post a Comment